
CONTROL CINEMÁTICO DE UN ROBOT MANIPULADOR

Ing. Juan Miguel Tintaya Padilla – R.N.I. 38894
Es Ingeniero Electrónico de la Universidad Técnica de Oruro (UTO) con Especialidad en Automatización Industrial y Mecatrónica Universidad Autónoma Gabriel René Moreno.
RESUMEN
Este documento se realizó con la finalidad de realizar el control de un brazo manipulador, que pueda contribuir con el desarrollo de robots que puedan llegar a realizar tareas de precisión, ya sea con fines metalúrgicos, mecánicos, médicos, etc. Al tener un estudio cinemático del manipulador se le puede dar un sinfín de aplicaciones.
El control sobre los ángulos de sus articulaciones y el punto final de movimiento, permite desarrollar tecnologías que van más allá de la robótica tradicional.
INTRODUCCIÓN
Uno de los propósitos de los sistemas inteligentes es resolver problemas con menor tiempo y con mayor precisión que los seres humanos. Para cumplir este propósito, existen ciertos análisis que necesitan un estudio mayor, como el caso de reconocimiento de patrones, orientación de un robot, entre otros.
En la actualidad la mayoría de grandes y medianas empresas destinadas a la producción utilizan en sus plantas, cada vez con mayor frecuencia y complejidad, robots que permiten aumentar su capacidad y calidad. Por ese motivo la robótica es uno de los campos con mayor velocidad de desarrollo.
DESARROLLO
Cinemática de un Robot
La cinemática estudia el movimiento del manipulador robótico con respecto a un sistema de referencia sin considerar las fuerzas que lo producen. Se distingue entre cinemática directa e inversa.
Cinemática Directa
A partir de un modelo básico de un robot de 4 grados de libertad se realizó la parametrización mediante el algoritmo Denavit Hatenberg, para hallar su cinemática directa.

FIGURA 1 Parametrización de un Robot de 4gdl con el algoritmo Denavit Hatenberg
A partir de la figura 1 se obtiene la matriz homogénea que nos muestra la matriz de traslación y rotación de las articulaciones con respecto a una coordenada inicial.
T=A50=A10A21A32A43A54
A50=h11 h21 h31 h41 h12 h13 h14 h22 h23 h24 h32 h42 h33 h43 h34 h44
Con estos datos se puede obtener el vector de traslación del brazo robot, teniendo en cuenta que:
x y z =h41 h42 h43
Reemplazando con los valores obtenidos:
x y z =cos q1d3cos q2+q3+d2cos q2+d4cos q2+q3+q4 q1 d3cos q2+q3+d2cos q2+d4cos q2+q3+q4 d1+d3q2+q3+d2q2+d4q2+q3+q4
Cinemática Inversa
La cinemática inversa consiste en la obtención de las posiciones de todos los elementos del manipulador, cuando se conoce posición y orientación final.
Se obtendrán las coordenadas articulares q1,q2,q3 y q4 de acuerdo a la figura 2.

FIGURA 2 Ilustración Geométrica del Manipulador
q1=pypx (1)
q2=d22-d32+L12+L222*d2*L12+L22-L1L2 2
q3=d22+d32-L12-L222d2d3 (3)
q4=-d22-d32+L12+L222*d2*L12+L22+L1L2 -d22+d32-L12-L222*d2*d3 d22+d32-L12-L222*d2*d3 (4)
Las ecuaciones 1,2,3,4 reflejan como resultado de un análisis geométrico del manipulador.
CONCLUSIONES
Se pudo realizar un análisis cinemático directo de un robot de 4 grados de libertad en el que a partir de ángulos de movimiento es posible determinar la posición x y z del efector final.
A partir de un análisis geométrico se pudo determinar la cinemática directa del manipulador en el que a partir de coordenadas x y z es posible determinar los ángulos del manipulador robótico.
El presente análisis da como siguiente paso el realizar el análisis dinámico del manipulador en el que se podrán obtener el análisis de fuerza a partir del análisis Euler-Lagrange, para el dimensionamiento a su vez del sistema de control.
El algoritmo Denavit-Hatenberg es muy útil al momento de resolver matrices homogéneas en robots.
REFERENCIAS BIBLIOGRÁFICAS
- Barrientos, Fundamentos de la Robótica, Editorial: S.A. MCGRAW-HILL, 2007
- Copa. (2003, Mayo 13).Estructuras Básicas de un brazo robótico. [online]. Disponible en: http://coparoman.blogspot.com/2013/05/13-estructuras-basicas-de-un-brazo.html
- Hernández. (2012. Agosto 26). Estructura de los robots. [online]. Disponible en: https://roboticajh.wordpress.com/2013/08/26/estructura-de-los-robots/
Robot Antropomórfico disponible en página web: https://www.emaze.com/@ATTQFRFZ/presentation-name-copy1
CONTRASTE DE MODELOS HIDROLOGICOS SEMI-DISTRIBUIDOS EN CUENCAS DE ALTA MONTAÑA

Ing. Carlos Ivan Escalier Romero - R.N.I. 39937
Es Ingeniero Civil de la Universidad Católica Bolivia “San Pablo”, MBA master en desarrollo y gestión de proyectos – Business School CumLaude – Universidad de Nebrija
RESUMEN
Con el concepto de realizar un enfoque de manejo integrado de cuencas hidrográficas, preservar la productividad, integrar una gestión adaptativa y desarrollar el modelo del balance hídrico. El proyecto de investigación buscara esclarecer, mediante comparaciones de cuatro modelos hidrológicos (SWAT, WEAP, TEMEZ y BALANCE HIDRICO), el que más se ajuste a la realidad; analizando la influencia de los datos de entrada sumado a la operatividad del modelo hidrológico así conociendo las ventajas y desventajas de cada uno de ellos seleccionar uno que permita entender el comportamiento hidrológico de las micro-cuencas en estudio utilizando modelos hidrológicos semi-distribuido en cuencas de alta montaña (Cuenca Kaluyo)
Palabras Clave: Ciclo hidrológico, Cuenca Fluvial, Escorrentía, Evapotranspiración
INTRODUCCION
Un adecuado manejo de los recursos hídricos comprende un proceso de desarrollo coordinado que involucra el manejo de recursos del agua y de la tierra. Su propósito es de organizar y guiar el uso del agua utilizados en una cuenca hidrográfica para proporcionar los bienes y servicios apropiados mientras se mitiga el impacto sobre el suelo y los recursos de la cuenca hidrográfica
La modelación hidrológica es una herramienta de ayuda que permite entender y evaluar estos procesos para así identificar las ventajas y desventajas de las acciones antrópicas sobre ecosistemas de montaña y su afección los recursos hídricos. Los modelos hidrológicos tratan de reproducir el fenómeno lluvia-escurrimiento en una cuenca, por ello es muy importante la implementación de estos modelos para la toma de decisiones en la aplicación de modelos hidrológicos en micro cuencas de montaña.
Existen un gran número de modelos hidrológicos en nuestro medio, algunos más complejos que otros en cuanto a la recolección de datos iniciales, otros con menos requerimientos de inputs y menos iteraciones. Pero a pesar del avance exponencial que se dio en la tecnología y detalladamente en el ámbito de la hidrología, no se dio con un modelo hidrológico el cual pueda determinar con exactitud el comportamiento hidrológico; esto se debe a la incertidumbre que se origina por la suma de varios componentes (Datos, Cobertura, Suelo, Medio)
DESARROLLO
El proceso de un modelo hidrológico se realiza usualmente a través de modelos matemáticos, los cuáles pueden ser determinísticos o probabilísticos, agregados o distribuidos, de base física o empíricos, continuos o de eventos. La decisión acerca de qué tipo de modelo adoptar debe basarse tanto en las características de la cuenca que se pretende modelar, el tipo de producto de salida requerido, como de la disponibilidad de datos en relación a las demandas del modelo. (Chow, 1994)
Además, (Estrela, 1993) sostiene que los modelos matemáticos pueden dividirse en dos grandes grupos, los determinísticos y los estocásticos:
- Determinísticos. - Las variables vienen determinadas por las leyes físicas consideradas como exactas y que explican toda su variabilidad
- Estocásticos. - Las variables son regidas en todo o en parte por las leyes del azar, y por tanto caracterizadas en términos de probabilidad
Donde se puede desglosar los modelos determinísticos en los siguientes ramales:
Modelo empírico. – Mayormente denominados como de “caja negra” o “misteriosos”, donde se obtiene una respuesta sin el conocimiento del funcionamiento interno
Modelo agregado. - Aquellos que consideran la cuenca en forma global (a nivel macro), y como un solo objeto de utilización.
Modelo distribuido. – A diferencia de su antecesor en este caso se toma a la cuenca en unidades hidrológicas (a nivel micro), discretizados por los parámetros de suelos, coberturas, topografía, etc.
Modelo semi-distribuido. - Modelos intermedios a los dos interiores, que en esencia resultan de combinar un modelo agregado muchas veces, tantas como en subcuencas se divida la zona de estudio
La Fig. 1. muestra un esquema de la representación espacial de la cuenca con los tres tipos de modelos de interés
Figura. 1: Clasificación de modelos hidrológicos de acuerdo a su representación espacial.
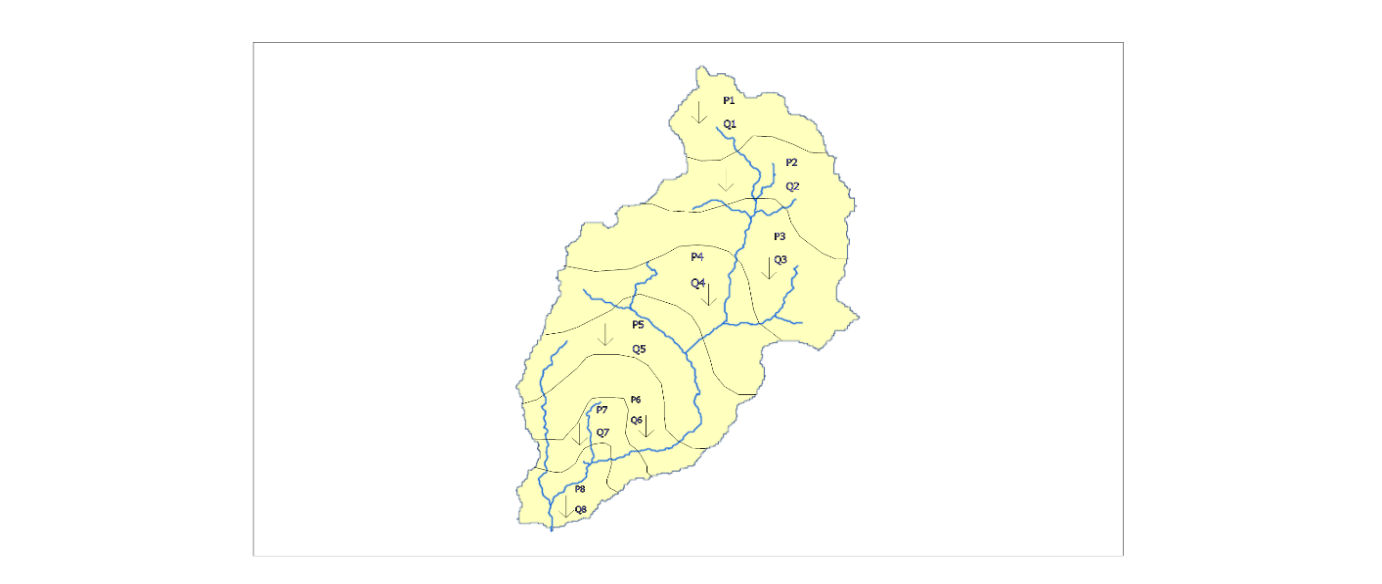
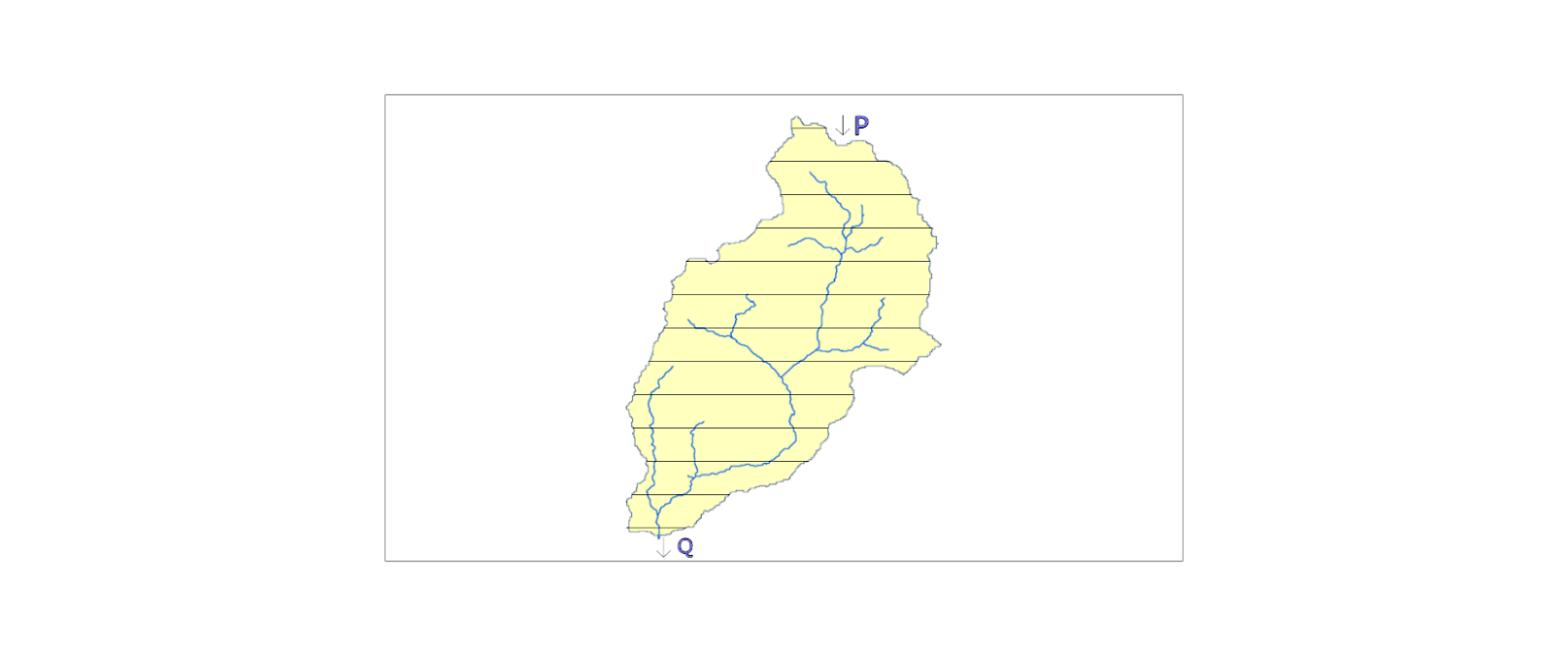
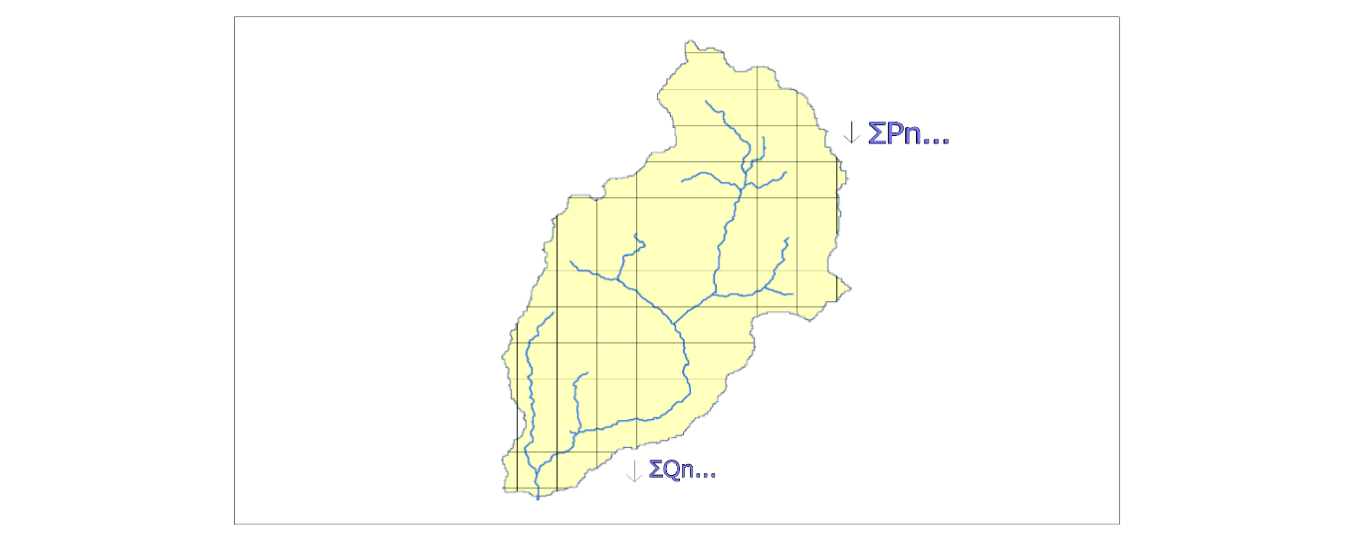
- Modelo agregado. b) Modelo Semi-distribuido. c) Modelo Distribuido
Fuente: Elaboración Propia.
Topográficamente el valle de la cuenca del río La paz presenta una orientación Norte-Sur, separada por cordones montañosos, alcanzando en su parte más elevada los 5000 m.s.n.m., cerca al nevado de Chacaltaya, y en su parte más baja los 3900 m.s.n.m. El río principal de la misma es el Choqueyapu, que nace en las faldas del nevado Chacaltaya con el nombre de río Kaluyo; este río tiene una longitud aproximada de 25 Km (Molina, Ahenke, & Rejas, 1998). hasta el punto de control, dando lugar a la forma de la cuenca la cual será tomada para el proyecto
En medida de lo necesario para un balance hídrico es pertinente tomar como referencia el lapso de 20 años abarcables de la estación más conveniente (Estación “El Alto”)- (Senamhi, 2017), para conseguir un análisis optimo; en este caso se empleará la fase de estudio desde el año 1975 al 2015 tomando como una amplitud de 40 años para abarcar una solvencia de resultados
Figura. 2: Cuenca Kaluyo

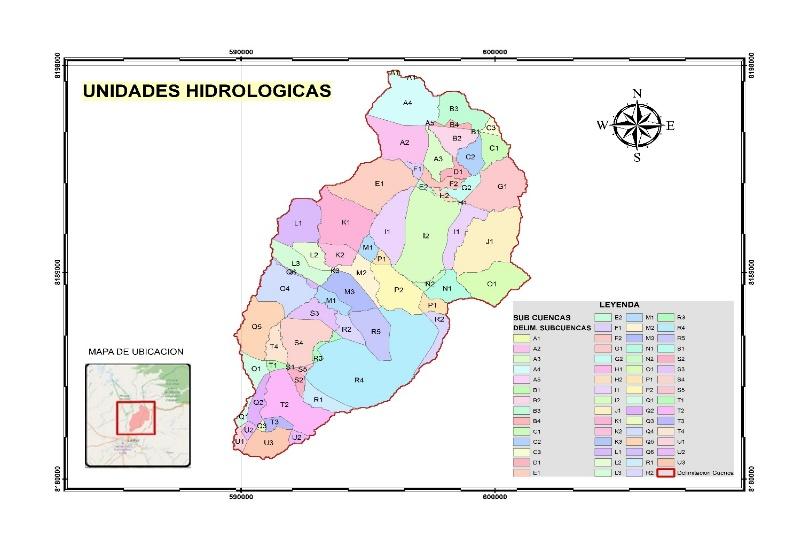
- Cuenca delimitada en Google Earth. b) Mapa Unidades Hidrológicas Clasificadas.
Fuente: Elaboración Propia.en base mapas (GeoBolivia, 2017)
De esta manera se pudo llegar a clasificar la cuenca Kaluyo en 61 unidades hidrológicas, por lo tanto, se acoplará los modelos hidrológicos de forma semi-distribuida simulando de una manera mas acorde los efectos de la realidad en la cuenca.
RESULTADOS
Los caudales obtenidos se encuentran distribuidos de la siguiente manera: (medidos en m3/s)
Gráfico 1: Comparación medias anuales de los 4 modelos Balance Hídrico, Témez, SWAT y WEAP con la serie de medias anuales de los caudales observados (Achachicala).
Fuente: Elaboración propia

Gráfico 2: Contraste de los promedios totales para cada modelo.


Fuente: Elaboración propia
El Grafico 1 es una comparación de las medias anuales. El Grafico 2 es la comparación de los promedios totales que muestran como valor próximo al observado el promedio total del modelo SWAT.
CONCLUSIÓN
Como se puede ver en el grafico 1 y 2 la disputa entre los cuatro modelos respecto a la comparación del caudal observado (caudal medido Achachicala), nos indica claramente dos modelos hidrológicos que presentan más concordancia si nos vamos a la media general (Grafico 2) el modelo SWAT es el que presenta mayor similitud con el real; seguido con el valor del modelo WEAP.
Ambos modelos, tanto WEAP como SWAT son los que reflejan un mayor sentido de representación “cuenca real – cuenca simulada”; esto se debe a una representación más acertada del aporte de aguas subterráneas (Recarga Acuífera). - A través de la percolación se infiltra y amacena agua subterránea. Este proceso hidrológico está estrechamente relacionado a la recarga de las aguas subterráneas en la cuenca, aspecto que el método del balance hídrico no considera, y el método de Temez lo adopta ligeramente
Se deduce que el modelo hidrológico SWAT recurre a una ponderación entre valores extremos generalizándolos y distribuyéndolos a lo largo del recorrido mensual, esa es la razón del porque en cuanto al promedio se acerca bastante al caudal medido.
El modelo SWAT a pesar de contar con un robusto sistema de procesamiento y un modelo firmemente estructurado presenta la desventaja de contar con una base de datos local de uso del suelo la cual para el operador norteamericano presenta una ventaja. Pero para el operador extranjero presenta la obligación de editar la base de datos, adaptándola al medio regional y haciendo caso omiso de algunos factores de ponderación propios del modelo. Aun así, para llegar al optimo procesamiento del modelo SWAT en nuestro medio nacional se requiere un análisis diferenciado y dedicado solo del modelo en estudio y una calibración que recoja información no solo de las variables sensibles, sino también del trasfondo de las ecuaciones que gobiernan al modelo.
REFERENCIAS BIBLIOGRAFICAS
Campos Aranda, D. (1992). Procesos del Ciclo Hidrológico . Ciudad de Mexico: Universidad Autónoma de San Luis Potosi.
Chow, V. (1994). Hidrologia Aplicada. Illinois: McGraw-Hill.
Estrela, T. (1993). Estimacion de parametros de recarga y descarga en un modelo de flujo subterráneo en un manantial cárstico. Madrid, España: Ministerio de Fomento.
GeoBolivia. (15 de Agosto de 2017). GeoBolivia. Obtenido de Infraestructura de Datos Espaciales: http://geo.gob.bo/portal/
Molina, J., Ahenke, J., & Rejas, S. (1998). Estudio Hidraulico del tramo Superior del Rio de La Paz. La Paz, Bolivia: Instituto de Hidráulica e Hidrologia (UMSA).
Senamhi. (15 de Agosto de 2017). Servicio Nacional de Metereologia e Hidrologia. Obtenido de Servicio Nacional de Metereologia e Hidrologia: http://www.senamhi.gob.bo/sismet/index.php
Thornthwaite, C. W., & Mather, J. R. (1955). The Water Balance. New Jersey: Centerton: Drexel Institute of Technology, Laboratory of Technology.
Informática forense en dispositivos de almacenamiento (unidades de discos sólidos)

Ing. Humberto Aguilar Lobo - R.N.I. 29057
Es Ingeniero Informático de la Universidad Técnica de Oruro con Maestrías en Seguridad Informática y Educación Superior basada en Competencias, Ph.D.(c) en Ciencia y Tecnología.
RESUMEN
Este artículo tiene por objeto contribuir al estudio de la informática forense en función a herramientas de recuperación de archivos eliminados en unidades de almacenamiento en discos sólidos. Se trata de un estudio de enfoque cuantitativo, del tipo descriptivo, en el que se empleó un diseño no experimental de corte transeccional o transversal. La variable de estudio fue la recuperación de archivos en discos sólidos de 1 [Tb] de capacidad. La población estuvo constituida por herramientas de recuperación de archivos eliminados, de ella se tomó como muestra tres herramientas especializadas. El instrumento empleado fue sistemas de medición por aparatos en base a software especializado en la obtención de datos. Los resultados demostraron que de las herramientas vistas, dos cuentan con mayor rendimiento en tiempo y capacidad en la recuperación de archivos eliminados en unidades de almacenamiento de discos sólidos, siendo muy útiles para llevar a cabo el procedimiento de recuperación de información.
Palabras clave: Informática forense, unidades de almacenamiento, recuperación de archivos.
INTRODUCCIÓN.
La informática forense comprende diferentes procedimientos, uno de ellos es la “Recuperación de archivos eliminados” que ciertamente en los sistemas actuales, los archivos no son eliminados físicamente sino en su forma lógica, esto implica que la información permanece aún después de ser eliminada del sistema. Siendo así, que la informática forense puede intentar reconstruir la estructura de los archivos que la contenía a fin de buscar evidencias en la misma. Existe una gran variedad de métodos de recuperación de archivos eliminados (y herramientas que los implementan) que trae a consecuencia la presente investigación. En este propósito, la interrogante general que motiva la presente investigación es: ¿Cuáles serían los resultados de aplicar herramientas de recuperación de archivos eliminados en unidades de almacenamiento en discos sólidos?
Después de las consideraciones anteriores, es importante empezar por una definición pertinente de este tema. Al respecto los autores (Castañeda Vilchis, Rojas Barrera, & Villanueva Pallares, 2009) afirman: “…la recuperación de información eliminada a partir del sistema de archivos comprende la búsqueda de la información directamente en el espacio de datos omitiendo todo tipo de estructura de sistema de archivos” (p.6)
DESARROLLO
MÉTODOS Y MATERIALES.
Métodos. La metodología a utilizar tiene su fundamento en la siguiente tabla (1):
Tabla 1. Metodología aplicada en la investigación.
|
Metodología |
Característica |
|
Enfoque y diseño |
Se sustentó en el enfoque cuantitativo, del tipo de diseño no experimental, transeccional descriptivo. El objetivo es describir los resultados de aplicar herramientas de recuperación de archivos eliminados en unidades de almacenamiento en discos sólidos. |
|
Población y muestra |
Se define como población a un conjunto finito de elementos con características comunes y que concuerdan con determinadas especificaciones (herramientas de recuperación de archivos eliminados). La muestra es del tipo no probabilística —desde la visión cuantitativa— su utilidad requiere no tanto una “representatividad” de elementos de una población, sino una cuidadosa y controlada elección de casos con ciertas características especificadas. Está se integra por tres herramientas especializadas. |
|
Instrumentos de recolección de datos |
A los efectos de este, se aplicó sistemas de medición por aparatos, a través de instrumentos de software especializado en la obtención de datos, permitiendo la validación y verificación del objetivo de la investigación. Los resultados son tabulados, codificados, procesados y analizados, manejando procedimientos propios de la informática forense. |
Fuente: Elaboración propia.
Materiales.
Tabla 2. Materiales que se utilizó en la investigación.
|
Descripción |
|
|
|
Software especializado |
|
Fuente: Elaboración propia.
RESULTADOS.
HERRAMIENTA FORENSE [FTK IMAGER].
Haciendo uso de esta herramienta se toma de la imagen del disco solido de capacidad de 1 [Tb] en formato “.dd”, (formato de aceptación). La herramienta proporciona archivos con información “MD5” y “SHA”, para verificar si la imagen ha sido cambiada o no. Teniendo la imagen del disco, se procedió a realizar el análisis, matizando que FTK crea diferentes detalles de la información que se encuentra en el disco, como posiciones de memoria o un mapa hexadecimal de los mismos.
“Gb”, es el símbolo de una unidad de medida informática cuyo nombre es Gigabyte.
“Bits”, es una unidad mínima de información, que puede tener solo dos valores (cero o uno).
“Tb”, es el símbolo de una unidad de medida informática cuyo nombre es Terabyte
“MD5”, es un algoritmo de reducción criptográfico de 128 bits ampliamente usado en seguridad informática.
“SHA”, es un algoritmo de Hash seguro de una familia de funciones de cifrado.
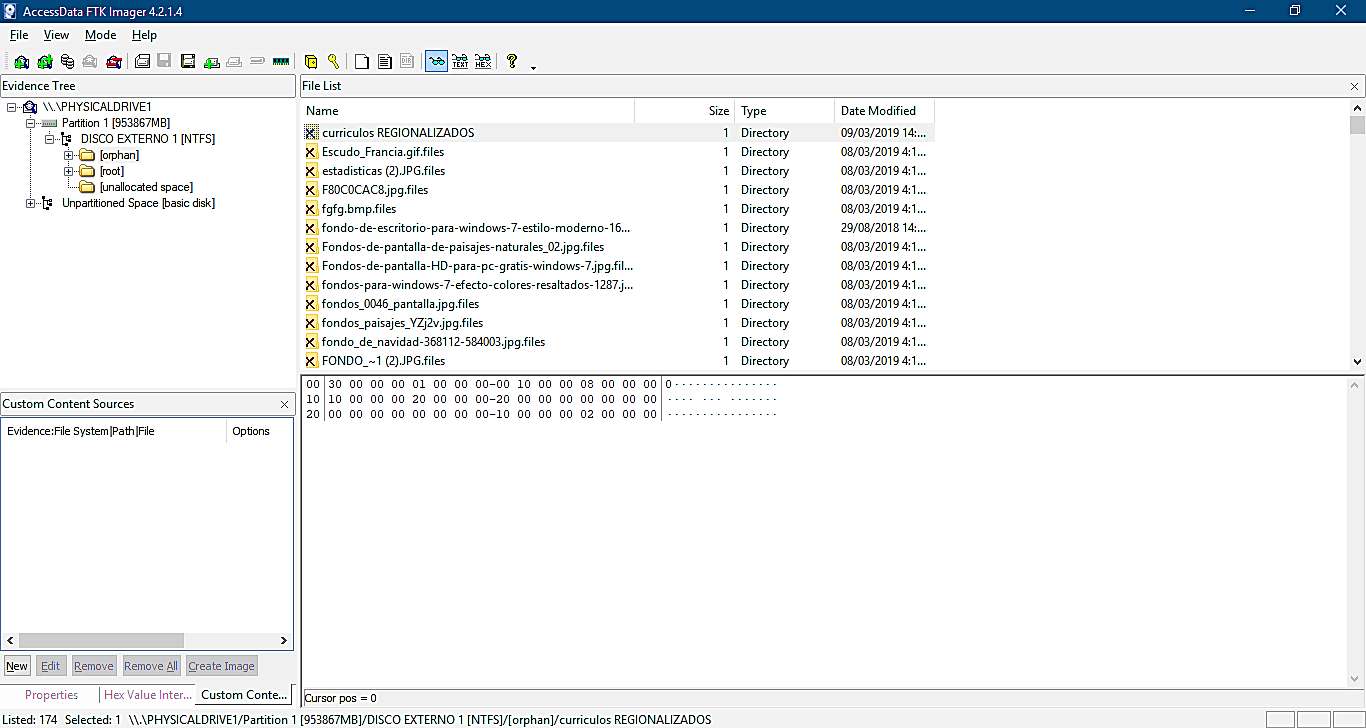
Figura 1. Resultados con FTK IMAGER.
Fuente: Elaboración propia.
HERRAMIENTA FORENSE [RECUVA].
Está herramienta permitió recuperar archivos borrados del tipo: documentos, imágenes, videos, músicas, entre otros, pero teniendo debilidades como la recuperación de archivos cuando se ha dado un formato rápido, este tipo de procedimiento puede ser un factor muy importante de riesgo para la informática forense.

Figura 2. Resultados con Recuva.
Fuente: Elaboración propia.
HERRAMIENTA FORENSE [AUTOPSY].
Está herramienta, al igual que FTK IMAGER, trabaja sobre una imagen del disco, además que permitió organizar por casos de análisis la información que proporciona, es en valores hexadecimales y a través de banderas de un archivo (tanto de inicio como del final)

Figura 3. Resultados con Autopsy.
Fuente: Elaboración propia.
A continuación, se muestra los resultados obtenidos en base a las herramientas utilizadas:
Tabla 3. Análisis comparativos de los archivos encontrados y el tiempo estimado.
|
Herramienta |
Archivos encontrados |
Tiempo estimado de recuperación en [minutos] |
|
FTK |
12789 |
10:55 |
|
Recuva |
6929 |
5:15 |
|
Autopsy |
12970 |
15:30 |
Fuente: Elaboración propia.
Se realizó un nuevo análisis de comparación en base al formateo del disco utilizado, teniendo los siguientes resultados:
Tabla 4. Análisis comparativo de archivos encontrados en diferentes formateos del disco.
|
Herramienta |
Cantidad de archivos encontrados |
||
|
1er Formateo |
2do Formateo |
3er Formateo |
|
|
FTK |
11567 |
11430 |
11221 |
|
Recuva |
5129 |
4975 |
4890 |
|
Autopsy |
11952 |
11628 |
11445 |
Fuente: Elaboración propia.
Tabla 5. Análisis comparativo - diferentes formateos en tiempos estimados de recuperación de archivos.
|
Herramienta |
Tiempo estimado de recuperación en [minutos] |
||
|
1er Formateo |
2do Formateo |
3er Formateo |
|
|
FTK |
9:33 |
8:18 |
7:43 |
|
Recuva |
4:50 |
4:02 |
3:38 |
|
Autopsy |
13:48 |
13:16 |
12:34 |
Fuente: Elaboración propia.
Se puede evidenciar que las herramientas utilizadas, cumplen con su objetivo principal, pudiendo recuperar una gran cantidad de archivos, teniendo a FTK IMAGER y AUTOPSY como las óptimas en cuanto a volumen de archivos recuperados, con un tiempo prudente. También cabe mencionar que la herramienta RECUVA utilizó una mayor disposición de tiempo y no logró recuperar la misma cantidad de archivos que las otras herramientas. De la misma manera se puede afirmar que entre más cantidad de veces haya sido formateado el disco de almacenamiento, la recuperación de archivos tiende a disminuir.
DISCUSIÓN.
A través de esta investigación se ha intentado describir los resultados en función a herramientas de recuperación de archivos eliminados en unidades de almacenamiento en discos sólidos. De las mismas se puede mencionar que FTK IMAGER y AUTOPSY son herramientas completas, mientras que RECUVA tiene sus deficiencias, pero siendo cada una de ellas, muy útiles para llevar a cabo el procedimiento de recuperación de información. Es evidente entonces, que la recuperación de archivos a través de la informática forense puede agregar aspectos de debate, como la recuperación de archivos tiende a disminuir entre más cantidad de veces que haya sido formateado. Por ello, desde este trabajo se proyecta a la utilización de estas herramientas que pueda brindar una inmersión paulatina para el estudiante, con el fin de que los objetivos didácticos y las clases materialicen situaciones en entornos controlados.
CONCLUSIONES.
Dadas las condiciones que anteceden, se concluye que la informática forense representa un punto muy importante en la actualidad, y particularmente la recuperación de información, el procedimiento llevado a cabo en este artículo, puede ser calificado como satisfactorio, y es que se logró evidenciar resultados de investigación, siguiendo la metodología adecuada para cada uno de los procedimientos realizados, desde la implementación de diferentes técnicas para la recuperación de información demostrando una comparación de las herramientas seleccionadas, cotejando su alcance de cada una de ellas, y observando el rendimiento obtenido de acuerdo a su implementación y características específicas.
REFERENCIAS BIBLIOGRÁFICAS.
Castañeda Vilchis, F., Rojas Barrera, V., & Villanueva Pallares, N. (2009). Evaluación de herramientas para análisis forense orientado a discos duros. México.
Hernández-Sampieri, R., & Torres, C. P. M. (2018). Metodología de la investigación (Vol. 4). México Ed. F DF: McGraw-Hill Interamericana.
Arias, F. G. (2012). El proyecto de investigación. Introducción a la metodología científica. 6ta. Fidias G. Arias Odón.
Arias, F. G. (2008). Perfil del profesor de metodología de la investigación en educación superior. Universidad Central de Venezuela.
Posada, J. A. C. (2001). Metodología de la Investigación (Vol. 58). Bib. Orton IICA/CATIE.
Flores, M. D., Franco, M. E. V. E., Ricalde, D. C., Garduño, A. A. L., & Apáez, M. R. (2013). Metodología de la investigación. Editorial Trillas, SA de CV.
Namakforoosh, M. N. (2000). Metodología de la investigación. Editorial Limusa.
Moguel, E. A. R. (2005). Metodología de la Investigación. Univ. J. Autónoma de Tabasco.
Vélez, A. (2011). Metodología de la investigación. Medellín: EAFIT.
INGENIERÍA E INVESTIGACIÓN N°14


PLANEAMIENTO DEL USO DE LA TIERRA PARA SOCIEDADES RESILIENTES
