


Ing. Aaron Nestor Mamani Villca - R.N.I. 49393
Es Ingeniero Electrónico de la Universidad Mayor de San Andrés con Especialidad en Sistemas de Control y Diplomados en Educación Superior.
RESUMEN
El presente trabajo tiene como fin presentar el control inteligente basado en el aprendizaje emocional cerebral o BELBIC, el cual está basado en un modelo de un sistema límbico de cerebros de mamíferos. El uso del control inteligente ha tenido un impacto notorio en la ingeniería de control y ha demostrado tener una respuesta rápida, implementación relativamente sencilla, y robustez. Este controlador requiere de la definición de señales emocionales basadas en objetivos de control para la correspondiente aplicación. Se realiza la simulación del controlador BELBIC en un sistema de recolección de plántulas, y posteriormente se muestran resultados satisfactorios del control.
PALABRAS CLAVE. Control inteligente, BELBIC, inteligencia emocional, aprendizaje computacional, cognición, control no lineal.
INTRODUCCIÓN
En estas últimas décadas el estudio de sistemas inteligentes ha sido resaltado no solamente por su estudio intrínseco sino también por su amplia aplicación tecnológica. El diseño de sistemas inteligentes ha tenido un gran impacto en la ingeniería de control; gracias a ello, se han podido desarrollar técnicas de control basadas en redes neuronales, lógica difusa, y algoritmos genéticos. El aprendizaje emocional en este contexto es un algoritmo que ha sido inspirado en la psicología.
Moren y Balkenius presentaron un modelo computacional de la amígdala y la corteza orbitofrontal del sistema límbico. Posteriormente, se introdujo la aplicación del modelo de aprendizaje emocional BEL de Moren (C. Lucas, et al., 2004); así se definió el término BELBIC para el controlador basado en el modelo BEL. El controlador BELBIC es un ejemplo de los métodos del control inspirados en la biología basado en el sistema límbico de los cerebros mamíferos; este controlador se basa en los comportamientos emocionales de sistemas biológicos.
Existen ciertas ventajas en utilizar controladores inteligentes que reemplacen al afamado controlador PID. A menudo, los sistemas de alto orden, no lineales, con retardos, y demás no pueden controlarse con controladores lineales; por lo tanto, se suelen requerir de técnicas de control no lineales en estos sistemas. Cabe mencionar que algunas de las desventajas que usualmente se hayan en la implementación de controladores inteligentes son los descomunales requerimientos computacionales; no obstante, el controlador BELBIC no requiere de un vasto procesamiento y una enorme memoria para conseguir un buen desempeño.
DESARROLLO
MODELO LÍMBICO DE CEREBROS DE MAMÍFEROS
En este método de control, los factores como la excitación y la ansiedad son las bases para el aprendizaje. Se considera que las bases para la ansiedad son algunos estimulantes y el control del sistema debe actuar para reducir la ansiedad del sistema causada por estos estimulantes. El aprendizaje emocional cerebral (BEL) está dividido en dos partes, aproximadamente correspondiendo a la amígdala y a la corteza orbitofrontal. El tálamo es un componente importante que se encarga de recolectar información. La amígdala recibe señales del tálamo y de las áreas corticales, mientras que la corteza orbitofrontal recibe señales solamente de las áreas corticales y de la amígdala. El sistema también recibe una señal recompensa o señal emocional. El modelo del controlador con aprendizaje emocional es ilustrado en la figura 1.
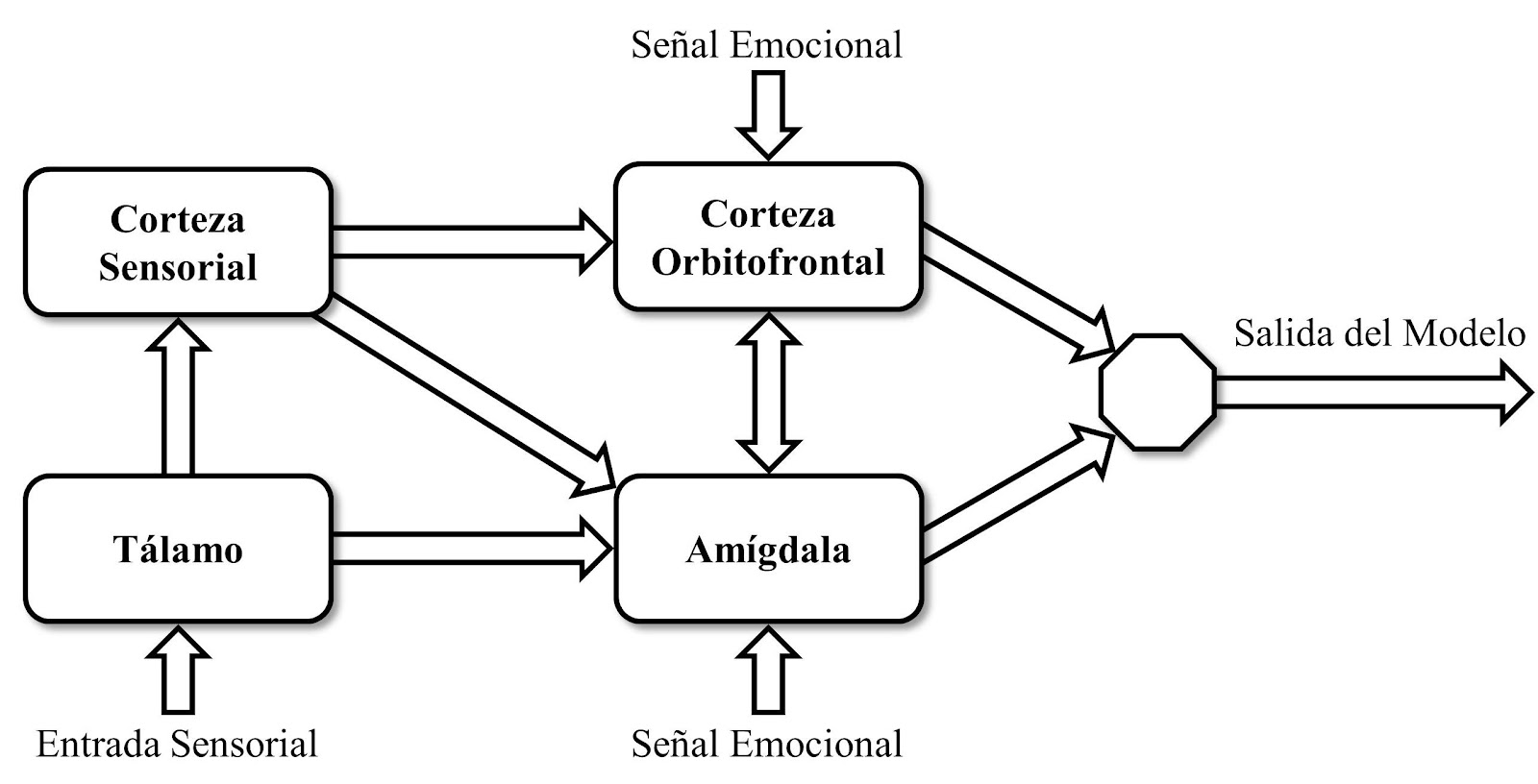
Figura 1. Estructura básica de un controlador emocional.
En la figura 2 se muestra el modelo computacional del aprendizaje emocional de manera más detallada. En esta figura se puede apreciar que existe un nodo para cada estímulo S. Se considerará a la j-ésima entrada sensorial como Sj.

Figura 2. Representación gráfica del modelo computacional del proceso de aprendizaje emocional (BELBIC).
Con base en la representación gráfica del modelo computacional BELBIC, el nodo E suma las salidas de A y Atl sustrayendo las salidas inhibitorias de los nodos O.

Donde e, y, u, y J son el error del sistema, la salida del sistema, la salida del controlador, y una función objetivo arbitraria de manera respectiva. La elección de estas funciones debe realizarse de acuerdo a la planta que se ha de controlar. En una buena cantidad de casos, la elección de una estructura PI o PID para la función de Rew tiene buenos resultados.
SIMULACIÓN DEL CONTROLADOR BELBIC
Se llevará a cabo la simulación del controlador emocional BELBIC para mostrar su desempeño con el sistema hidráulico de recolección de plántulas de tercer orden (X. Jin, et al., 2020).

La simulación del controlador BELBIC se presenta en la figura 3. La señal referencia es marcada con una línea negra no continua, y la salida del sistema es marcada con una línea azul continua. En los primeros segundos, el sistema no tiene un buen seguimiento a la referencia; sin embargo, luego se observa un aprendizaje del controlador inteligente, obteniendo resultados destacables.
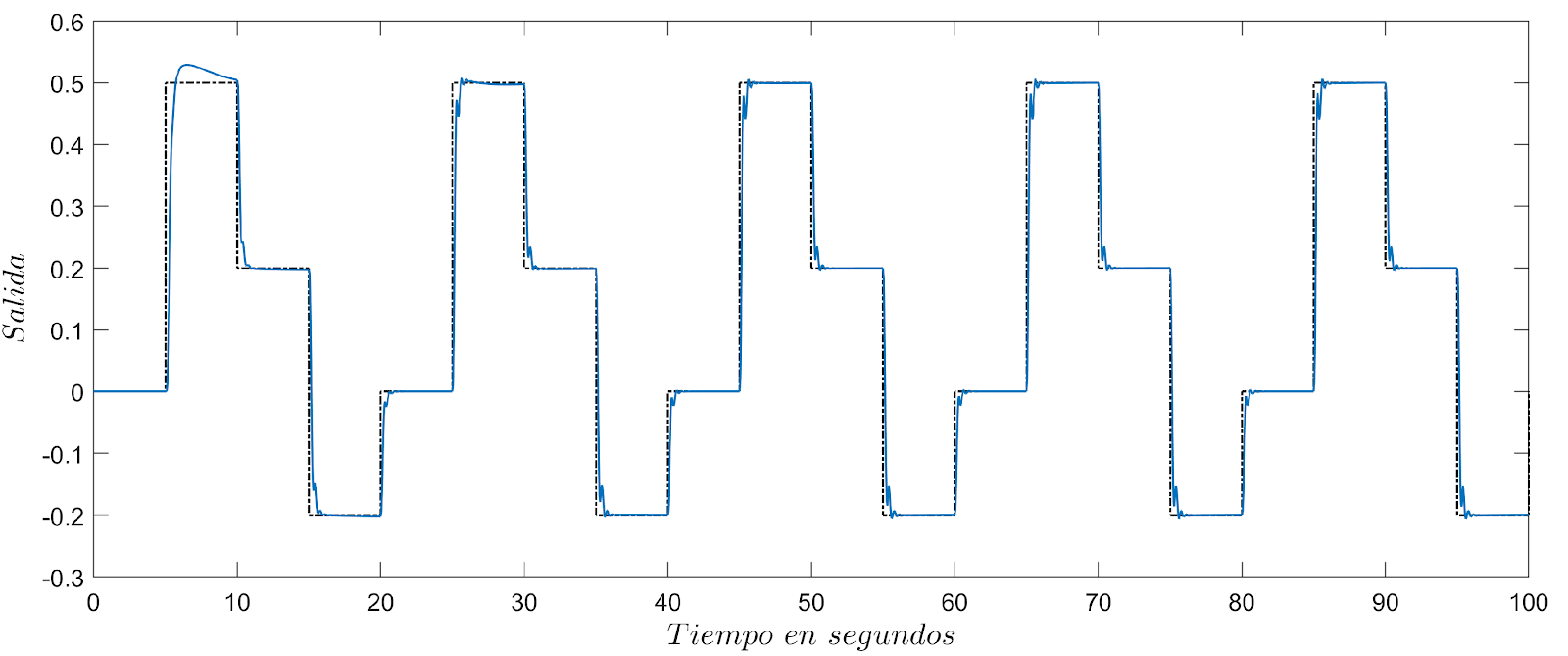
Figura 3. Respuesta del sistema con el controlador BELBIC.
CONCLUSIÓN
En el presente trabajo se ha presentado y simulado el controlador inteligente BELBIC. Los resultados de la simulación del controlador muestran un desempeño muy satisfactorio. Asimismo, cabe destacar que el controlador BELBIC posee una gran flexibilidad al manejar distintos criterios de desempeño. Para un control inteligente en tiempo real, el aprendizaje emocional es un método formidable debido a su simplicidad, baja complejidad computacional, y entrenamiento rápido.
La amígdala y la corteza orbitofrontal son componentes del cerebro humano que están involucradas principalmente en la generación de emociones. La estructura BEL también puede ser empleada en otros campos de la ingeniería, como ser el reconocimiento de emociones, macroeconomía, pronósticos, identificación de patrones, y demás.
REFERENCIAS BIBLIOGRÁFICAS
- A. Sahab y M. Taleb, “Intelligent Controller for Synchronization New Three Dimensional Chaotic System,” I.J. Modern Education and Computer Science, vol. 6, no. 7, pp. 40-46, 2014.
- M. Masoudinejad, R. Khorsandi, A. Fatehi, C. Lucas, S. Fakhimi y M. R. Jamali, “Real-Time Level Plant Control Using Improved BELBIC,” IFAC Proceedings Volumes, vol. 41, no. 17, pp. 4631-4635, 2008.
- A. M. El-Garhy y M. E. El-Shimy, “BELBIC for MRAS with highly non-linear process,” Alexandria Engineering Journal, vol. 54, no. 1, pp. 7-16, 2015.
- M. Moradi, “An Efficient Optimal Fractional Emotional Intelligent Controller for an AVR System in Power Systems,” Journal of AI and Data Mining, vol. 7, no. 1, pp. 193-202, 2019.
- C. Lucas, S. Fakhimi y M. R. Jamali, “Introducing BELBIC: Brain Emotional Learning Based Intelligent Control,” Intelligent Automation & Soft Computing, vol. 10, no. 1, pp. 11-21, 2004.
- C. Balkenius y J. Morén, “Emotional Learning: A Computational Model of the Amygdala,” Cybernetics and Systems: an International Journal, vol. 32, no. 6, pp. 611-636, 2001.
- X. Jin, K. Chen, Y. Zhao, J. Ji y P. Jing, “Simulation of hydraulic transplanting robot control system based on fuzzy PID controller,” Measurement, vol. 164, 108023, 2020.